
Or, apparently, fortnightly. Sure I’ve been doing stuff, too much stuff to be writing updates 🙂
Monday the 14th, cleaning the basement. Not very exciting in itself, but we’ll get to that…
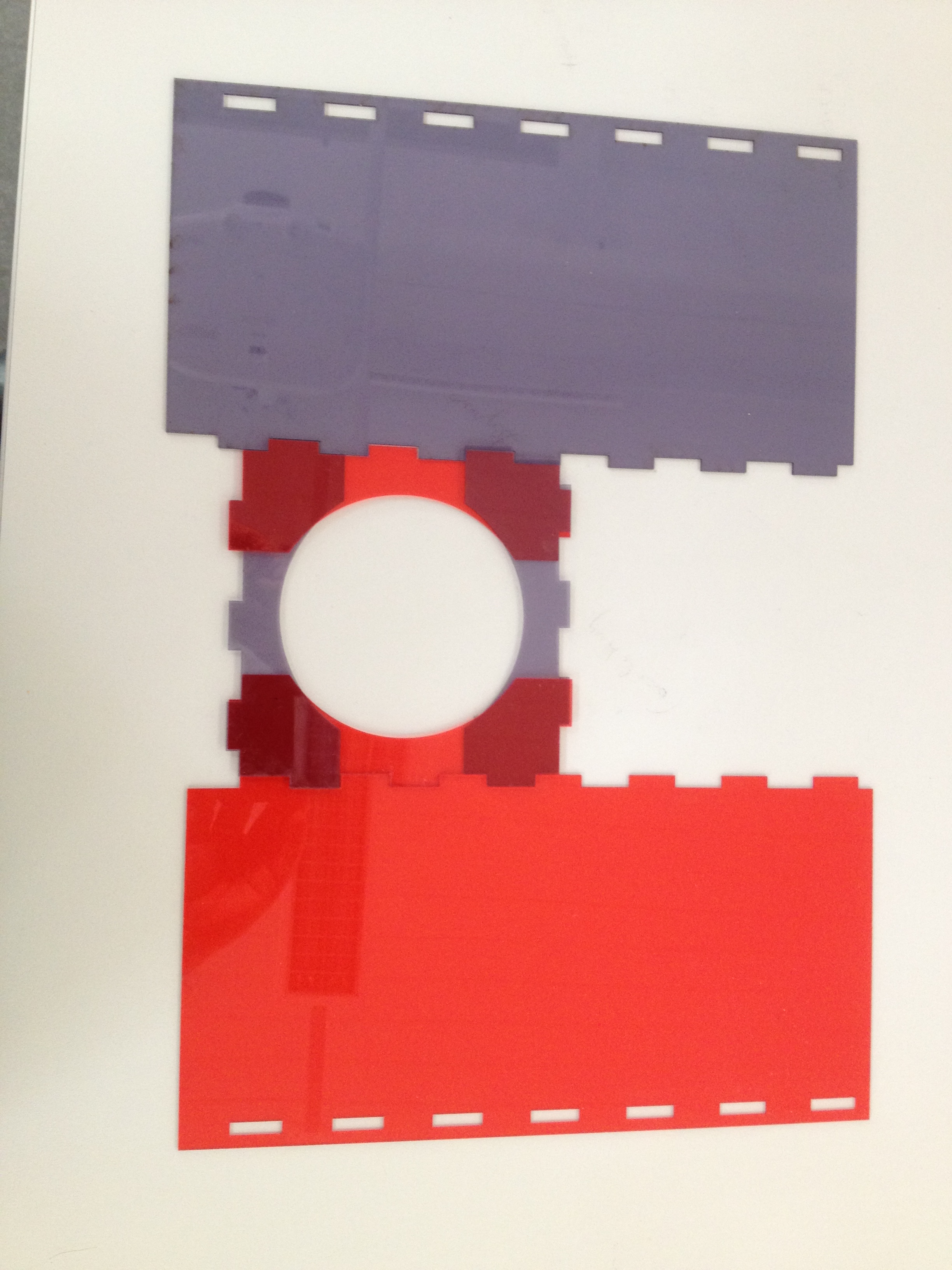
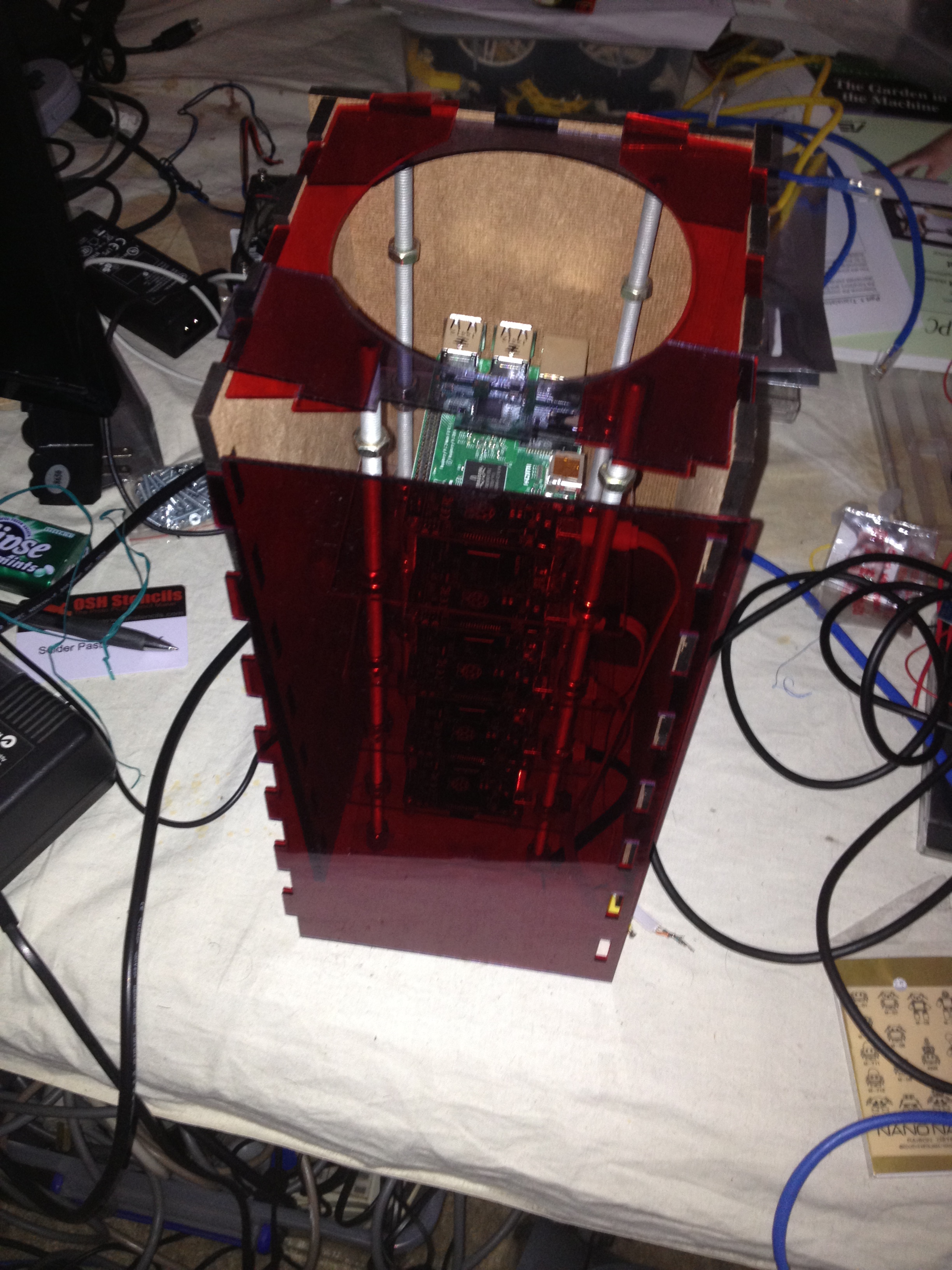
Tuesday the 15th – more laser cutting! Discovered that if you’re doing two separate runs of the same thing, you really need to watch the scaling factor. So now I have to clumsily file down the slots in front of the pi cluster enclosure 🙂 And the fan mount on top has worked nicely.
Wednesday the 16th
So, why did I clean up the basement?



That’s an Optimum lathe and mill. Little hobby things, and I need to bolt them to the concrete before I can use them, but that will revolutionise my home tinkering. That and the 3d printer I still haven’t fixed up…
Thursday 17th
Fuck knows. Recovering from Wednesday, probably, and avoiding drilling into the floor.
Oh, no, Kerbal! Spent some time installing kRPC, and getting the vt100 talking to KSP over the nyetwork. Behold!
Now I can launch flights from a monochrome text terminal 30 years old, rendering (heh) pointless all the glorious graphics of a lovely game. But it gives me scope to start tinkering with controls systems algorithms to run the damn thing.
Friday 18th
Back in to Swinburne to continues discussions about the ongoing arcade game design. Apparently, having finally done the 1800×500 version, we discovered that the machining centre tops out at 1500, so we had to redesign for 1500 long. Still, finally fucking down and handed over.
Monday 21st
Fuck all. Did go to see the new Star Wars with my girlfriend. It failed to suck.
Tuesday 22nd
Shiny!



That’s the arcade game frame, or bits of. Ready to be bolted together, albeit around a more solid central frame
Also: 
That’s a flex sensor for the robot arm project. It didn’t work out too well, but I have some more ideas. We’ll get there.
Wednesday 23rd
Properly fuck all. This arrived, though:

That will probably replace the motor in this:

Lighter, faster, smaller.
Thursday 24th
Something Christmas something… But I had a meeting with one of the lecturers at Swinburne about a project. Probably can’t talk much, but it involves control systems, BLDC motor control, code and electronics. Aww yeah.
Friday 25th
Something something Christmas. However, these arrived!

They’re version 0.1 of the robot arm EMG sensor, and they’re pretty, and completely fucking useless to me 🙂 They have the final output taken from the wrong pin on the final opamp. Oh well 🙂 V 0.2 should be a day or two away, and I have not yet found any crucial flaws in them.