
Monday:
Rejigging the EMG sensors. Apparently, I had the signal wire going to the wrong pin of the final IC. Oh well. On the bright side, DirtyPCB are cheap and fast. So the new version should be here in, now, a week.
Tuesday: Tinker Tuesday!
I am now in love with laser cutters. Working on an enclosure for the Pi cluster:

I have a Parallella to go on the top, but it really wants a fan, so now I have something to mount it on. We’ll see 🙂 But laser cutting is new to me, and it’s a whole new awesome world.
Wednesday:
I have ordered a small machine shop’s worth of tools. So, now I need a small machine shop to put them in. Fortunately, I have a basement:

Which is now probably clear enough. The mill on its stand is 185 cm tall. The cieling is 190cm. Heaps of room…
Thursday:
Mostly Dwarf Fortress, to be honest. Oh, and getting the soon-to-be Kerbal Mission Kontrol up and running:

That’s a vt100 connected to a BeagleBoard xM running Angstrom. That’ll talk to the PC running Kerbal, which will export mission data. Fun and games!
Friday:Working on a motor tester, which I’ve been meaning to get around to for a while. I need something I can just plug a stepper into to check that it works (I have a remarkabe amount of dubious steppers), so in a bid to retain what I learned in Embedded Systems this semester, I’m pressing an Attiny2313 into service: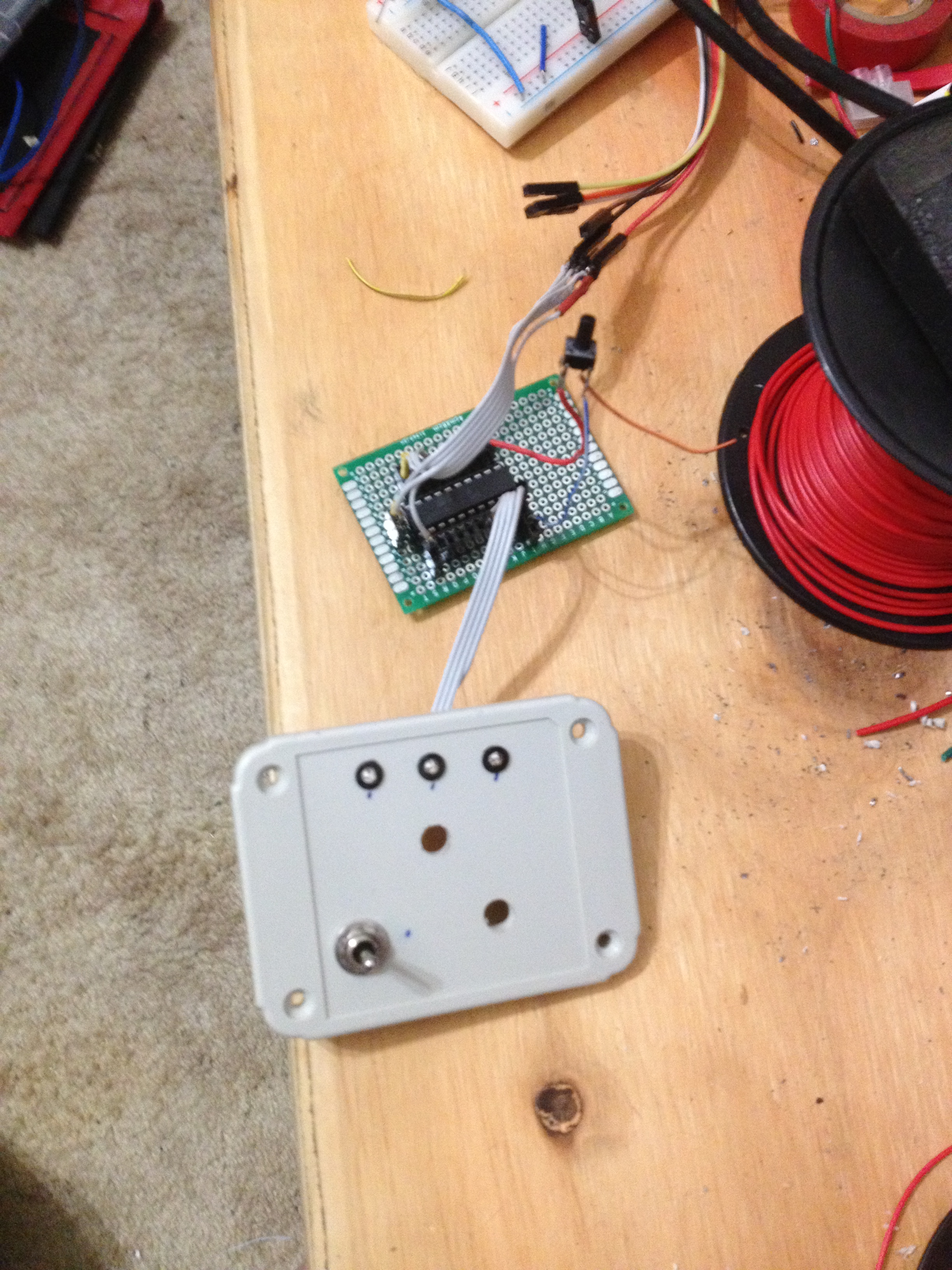 It will have stepper, servo and DC mode, forward and reverse, with adjustable speeds. Way overkill, but why not? One word of warning – debug your hardware at some point. I spent far too long debugging a switch debounce routine before hooking the switch up to a scope and realising it was knackered.
It will have stepper, servo and DC mode, forward and reverse, with adjustable speeds. Way overkill, but why not? One word of warning – debug your hardware at some point. I spent far too long debugging a switch debounce routine before hooking the switch up to a scope and realising it was knackered.