
I think I now have all the parts for the tiny project I’ve had in mind.
It starts with the omniwheels:

These are smaller than I expected, but that’s fine, everything else is going to be small too. Omniwheels are slightly less useful than Mecanum wheels , because you can’t create the kind of sideways movement you can with Mecanum wheels, but that leads to some drive theory a little outside the standard “4 wheels and a gripper” paradigm.
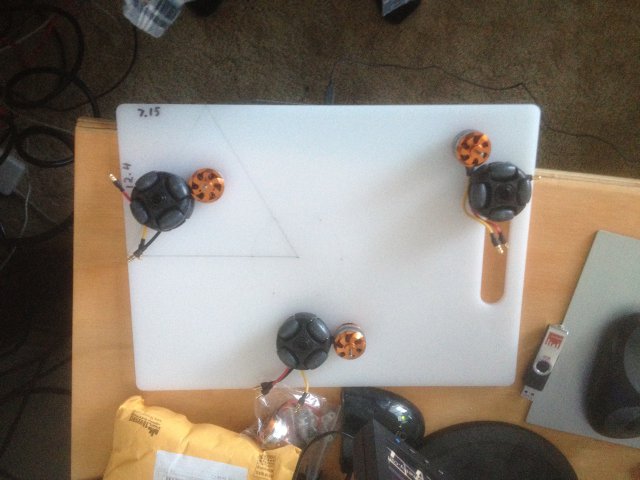
To whit, the Kiwi drive.

A Kiwi drive works (inefficiently) by driving wheels set at 60 degree angles to each other, which, since the omniwheel allows movement orthogonal to its orientation, creates actual drive in the direction that is the sum of their vectors (kinda. Rotation gets interesting, but never mind). So if you drive 2 wheels towards each other at the same speed, and leave the other idle, you get movement directly away from the idle wheel – on the angle bisecting the 2 drive wheels.
Pretty picture!

(I will, next post, go into the maths a little more. I’m easing into it…)
I thought the wheels were small. Then I got the batteries:

Tiny kiwi!
I had planned to gear the motor down – the math says with those wheels and the motors I have in mind, I get a no-load max speed of 72 Km/h. Of course, it’s not driving no-load, and that’ll drop to closer to 40, but still.
However, I’m not sure I got the right gears…

That’s the wheel underneath. That’s … suboptimal.
So direct drive it is. The Kiwi drive is, as I say, somewhat inefficient, and I can drive them ever so slightly underspec. We’ll see. I suspect, in fact, that the Kiwi drive is sufficiently inefficient that the speed will be fine.
And the final piece of the power and drive train:

Yeah. So they’re tiny! Which seems to be something of a theme. Tiny Kiwi. Tiny Kiwi. I think I shall call you … Tiwi.